No.22 徹底比較 第2弾! エンドエフェクタ 5メーカー 11シリーズを比べてみた!!

-
エンドエフェクタ(グリッパ/ロボットハンド)はロボットの先端に取り付けられ、「人間の手」のようにモノをつかんだり・挟んだりします。しかし実際には「手」ほど万能ではないため、ワークのサイズや形状、硬さなどに合わせた使い分けが重要です。
そこで今回はエンドエフェクタ選びの参考として、オリムべクスタがご用意している豊富なバリエーションと特徴をご紹介します。
- 基本の「き」- 【電動】と【空圧】 動力によって異なる特徴
エンドエフェクタの動力に多く見られるのが【電動(モータ)】と【空圧】。動力が異なると特徴や使い勝手が異なるため、選定する上では重要なポイントです。そこで、はじめにそれぞれの特徴についてご説明します。
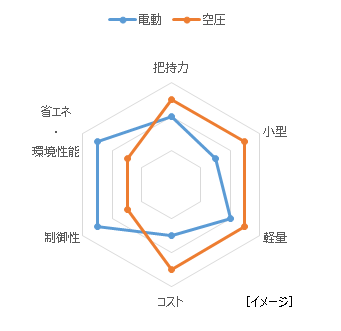
電動(モータ)
・把持力や速度、移動量の調整ができるので、異なるワークが混在している場合でも対応可能。
・EtherNet/IPやEtherCATといった代表的なFAネックワークに対応している製品が多い。
・電源があれば駆動できるので、設置場所の自由度が高い。また装置の移動やレイアウト変更も容易。
・バッテリに対応しているDC電源タイプは搬送ロボット(AMR・AGV・GTPなど)への搭載も可能。
・動く時だけ電力を使用するため省エネに貢献。カーボンニュートラルの取り組みに最適。空圧(エア)
・軽量なので可搬質量が小さい小型ロボットにも使用可能。
・つかむことが難しいサイズや形状のワークを吸着して移載。
・制御がシンプルなので導入のハードルが低い。
・小型なので省スペース化に貢献。
・高い把持力
・ローコスト5メーカー 11シリーズを一挙ご紹介!
代表的なスペックを一覧表にまとめました。写真をクリックするとWEBページ・カタログへリンクしますので、詳細はそちらをご確認ください。またワークを掴んだり吸着している様子を撮影した動画もございますのであわせてご覧ください。
電動仕様
メーカー 
ミューラボ※1
オリエンタルモーター※1
オリエンタルモーター※1
THK※1
フエストシリーズ μ dynamics Gripper 
EH3つ爪タイプ 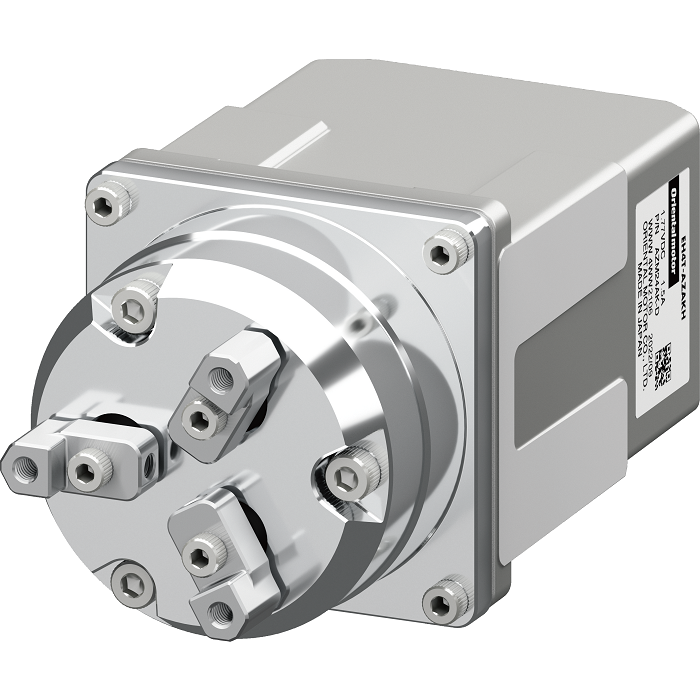
EH2つ爪タイプ 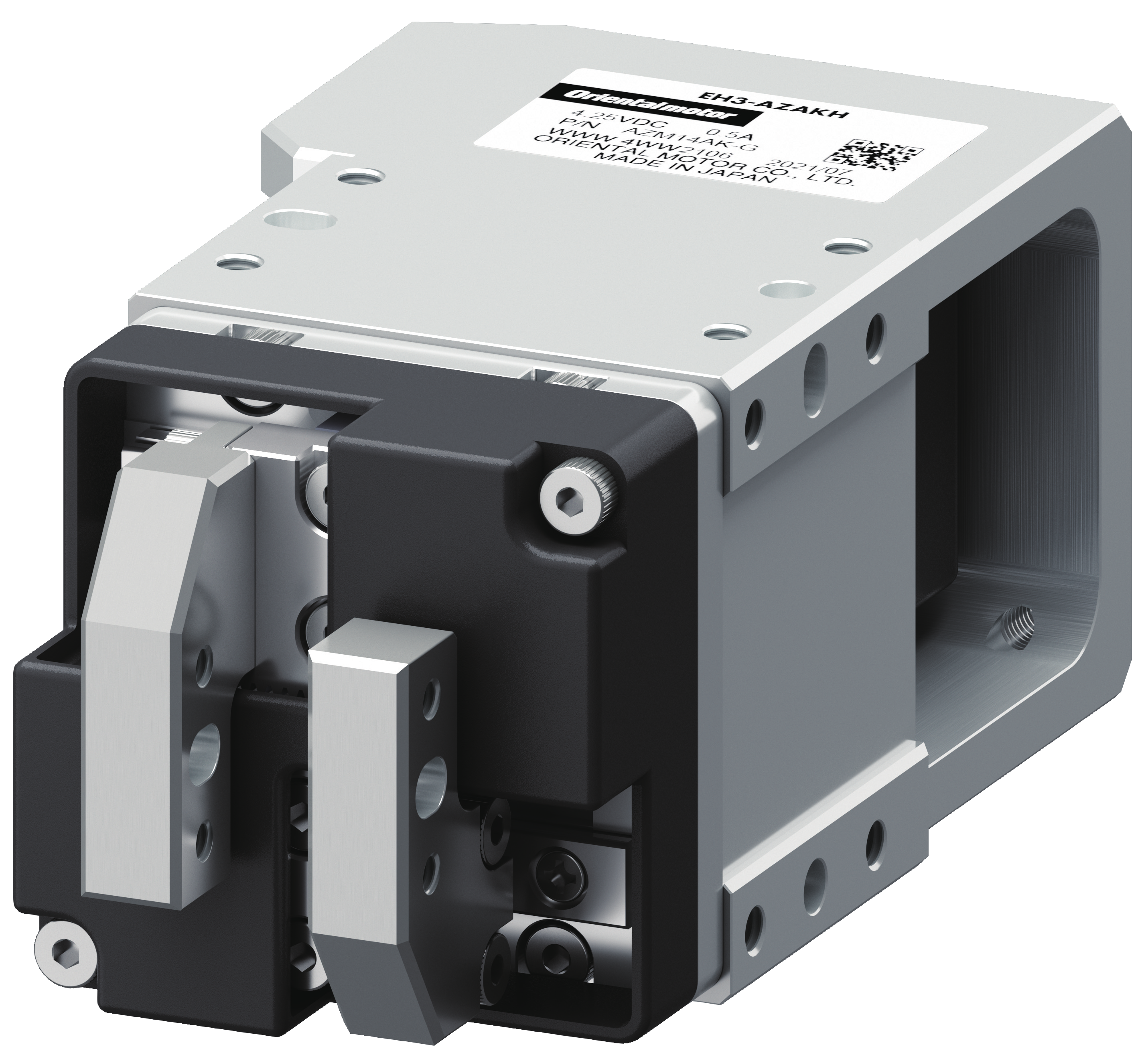
EG 
EHPS-RA1※2 
最大把持力[N] 20 50 25 102 462 最大許容荷重[N] ----- 15 5 ----- ----- 最大ストローク[mm] Φ40 Φ36※3 25 30 32 繰り返し位置決め精度[mm] ±0.01 ----- ±0.02 ±0.01 ≦0.01 質量[kg] 0.3 0.28~ 0.2 0.33~ 0.296~ 空圧仕様
メーカー 
マシン
エンジニアリング
フエストシリーズ MEPAC 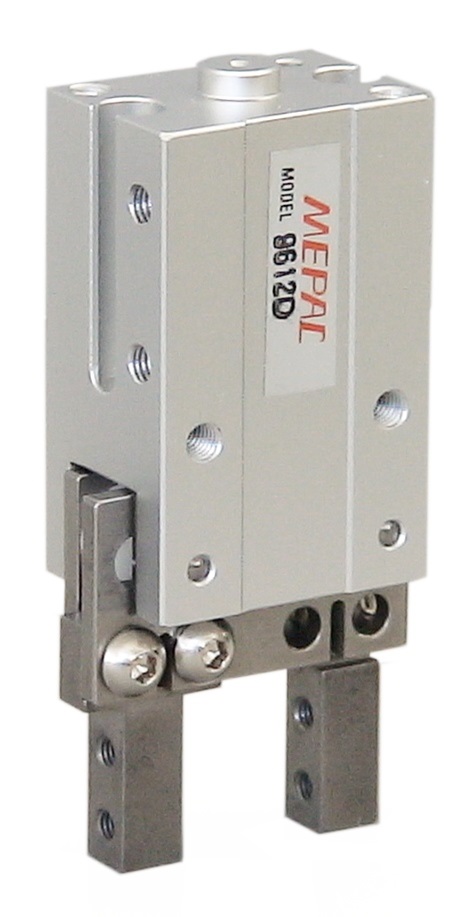
DHDS 
DHPS 
DHEF-RA1※2 
DHEB 
OGGB 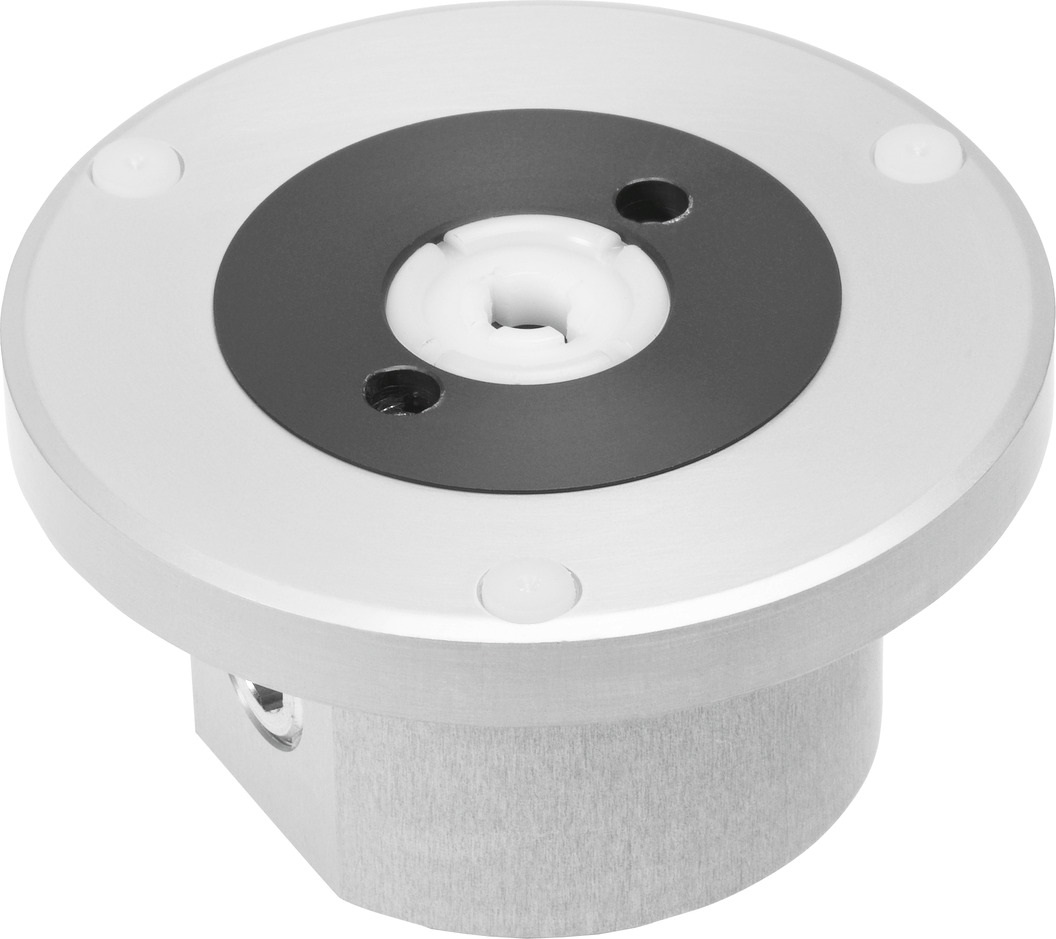
OVEL-RA1※2 
2爪チャック 3爪チャック 2爪チャック ゴム製キャップがなじみながら把持 ゴムが外側に変形して内径把持 ベルヌーイグリッパ(吸着) 真空技術の応用で吸着 最大把持力[N] 37 840 970 ----- 1000(保持力) ----- ----- 許容荷重[N] ----- ----- ----- 9.8(目安) 50 75 60(目安) 最大ストローク[mm] 12 6(爪1本あたり) 25 66 85(最大径) ----- ----- 繰り返し位置決め精度[mm] ±0.01 ≦0.04 ≦0.02 ----- ----- ----- ----- 質量[kg] 0.019~ 0.096~ 0.019~ 0.553 0.015~ 0.119~ ----- ※1:モータはオリエンタルモーター製αSTEP(アルファステップ) AZシリーズです。 ※2:ISO 9409-1(JIS B 8436)に準拠した取付インターフェースが付属されます。
※3:最大ストロークは内径側把持の最大値です。エンドエフェクタの"爪"におすすめ
Festo フィングリッパ DHAS
⿂の尾びれにヒントを得たFin Ray EffectⓇ構造により、スムーズでフレキシブルな把持を実現しました。柔らかくても⾮常に丈夫なジョイント接続部によって、あらゆる形状のワークにフィットします。
詳しい資料はコチラ⋙
動画で納得!使い分けのヒント
ここでは一般的なチャックではつかむことが難しいワークに対応可能なエンドエフェクタを動画でご紹介します。
中心が捉えにくい球体や円柱・円筒のワークに:ミューラボ μdynamics Gripper
2つ爪ではつかみにくい球体や円柱・円筒の把持におすすめです。動力のモータはトルク制御が可能なαSTEP(アルファステップ) AZシリーズなので、硬さやサイズが異なるワークが混在しても対応できます。また機構により位置を自己保持しますので、電源が切れてもワークを落としません。
形状が異なる小物部品に:Festo shape gripper 通称"カメレオン"
ワークの形状にゴム製キャップがなじみながら把持します。その様子はまさにカメレオンの捕食シーン! 形状が異なる不定形なワークの把持におすすめです。
デリケートなワークの内径把持に:Festo bellows gripper
空気圧でゴムが外側に変形し、圧力がなくなるとゴムのリセット力で収縮します。ワークとの接触がソフトなので、破損や傷の発生を抑えて把持します。
紙やフィルムなどデリケートなワークに:Festo bernoulli gripper
物理で勉強した"ベルヌーイの定理"の応用です。ワークがグリッパに近づくと、ワークとグリッパ間に流れるエアの流速が早くなり、真空が発生して吸着します。ワークはスペーサ以外と接触しないので、破損や傷の発生を抑えます。また圧縮空気の供給で動作するので、エジェクタが不要になり目詰まりを防止できます。
大きさの判定や測定に:αSTEP AZシリーズ搭載製品(ミューラボ:μdynamics Gripper.オリエンタルモーター:EH.THK:EG)
フィンガの動作範囲をドライバからの出力信号(TLC出力、AREA出力)によって確認できます。ワークをつかむだけでなく、大きさや有無の判定をおこなうことができます。
エンドエフェクタをロボットにご検討中のお客様へ
垂直多関節ロボットアームのご紹介全軸オリエンタルモーター製αSTEP(アルファステップ) AZシリーズのカタログ標準品を採用した垂直多関節ロボットアームです。オリエンタルモーター製電動グリッパ EHシリーズの取り付け金具をご用意していますので、ロボットアームへの実装もカンタンに行えます。
参考ページ:垂直多関節ロボットアーム採用事例 「価格」や「スペック」だけじゃない。オリムベクスタのロボットアームを選んだポイントとは。品名・外観 OVR5035K-V 
OVR4048K5-V、OVR4068K5-V、OVR4088K5-V 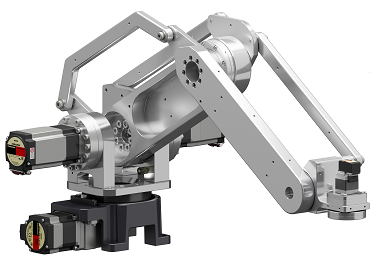
最大可搬質量[kg] 1 5 最大リーチ長(水平)[mm] 350 480、680、880 繰り返し位置決め精度[mm] ±0.05 ±0.05 入力電圧[V] DC24 DC24 本体質量[kg] 12.5 16.5、17.4、26.9 定価[万円] 98 110、120、140
エンドエフェクタ選びは『おまかせください』ワークや使用環境によってエンドエフェクタに求められるスペックはさまざまです。オリムベクスタではご紹介したバリエーションの中からお客様に最適な製品をご提案いたします。また実際のワークを使った把持・吸着のテストもお手伝いさせていただきますので、お気軽にお問い合わせください。
このページをまとめたパンフレットを作成しました。あわせてご覧ください⋙
