小型ロボット OVR 5軸垂直多関節
-
5軸垂直多関節 OVR5035K1-V
本体質量を12.5kgに抑えた垂直多関節ロボットアームです。
全軸オリエンタルモーター製αSTEP(アルファステップ) AZシリーズのカタログ標準品を採用しています。
駆動部のモータはDC電源入力タイプなので、電源ラインの引き回しが容易でラインへの設置やレイアウト変更にも柔軟に対応できます。
また、バッテリ駆動に対応していますので搬送ロボット(AGV・AMR・GTPなど)への搭載も可能です。
\ロボットの総合カタログはコチラ/ \グリッパやカメラを含むシステムの価格など/


特徴
■軽量・小型
本体質量はわずか12.5kg、設置面積は名刺約3枚分の130×130mm。持ち運び・据付けが容易なので、ラインへの設置やレイアウト変更にも柔軟に対応。 また電動スライダと組み合わせたカスタム対応にも最適です。 ロボットアームや電動スライダを含むシステムの価格は? お問い合わせはこちらから ⋙
■高精度位置決め 繰返し位置決め精度は±0.05mm。
精度が必要な工程の自動化にもお使いいただけます。
参考ページ:[採用事例]こんな使い方されています!リアルなお客様の声はこちら ⋙
■パワフル
最大可搬質量 1kg(DC24V)。小型でありながら様々な作業に対応します。
最大可搬質量 5kgのロボットアームもご用意しています。詳しくはこちら⋙
■お客様にてモータ交換が可能
一部のモーターをお客様にて交換できます。導入後のメンテナンス負担(コスト・時間)を軽減します。
※当社でも保守・メンテナンス時のモーター交換をおこなっています。 こちらまでお問い合わせください。
参考ページ:[採用事例]モータ交換が採用ポイント!リアルなお客様の声はこちら ⋙
■センサレス設計
AZシリーズに搭載した機械式アブソリュートセンサ「ABZO(アブゾ)センサ」は常時位置情報を管理。そのため、原点復帰運転に必要だった外部センサなどを削減し、センサレス設計が可能です。
仕様

*1 負荷1kg時、高さ25mm、幅300mmの2点間を往復させるのに要する時間です。オリエンタルモーター製ロボットコントローラMRC01を使用した時のサイクルタイムです。
*2 原点ピン穴に位置決めピンを入れた設置原点姿勢(L、U、Bp軸垂直姿勢)の状態より可動できる範囲
* 推奨電源容量DC24V 600W
* 入力電圧 DC48V の駆動で2kgの可搬も可能です。
| 取扱説明書 |  |
| 3DCAD | OVR5035K1-V(3D) |
| 2DCAD | OVR5035K1-V(2D) |
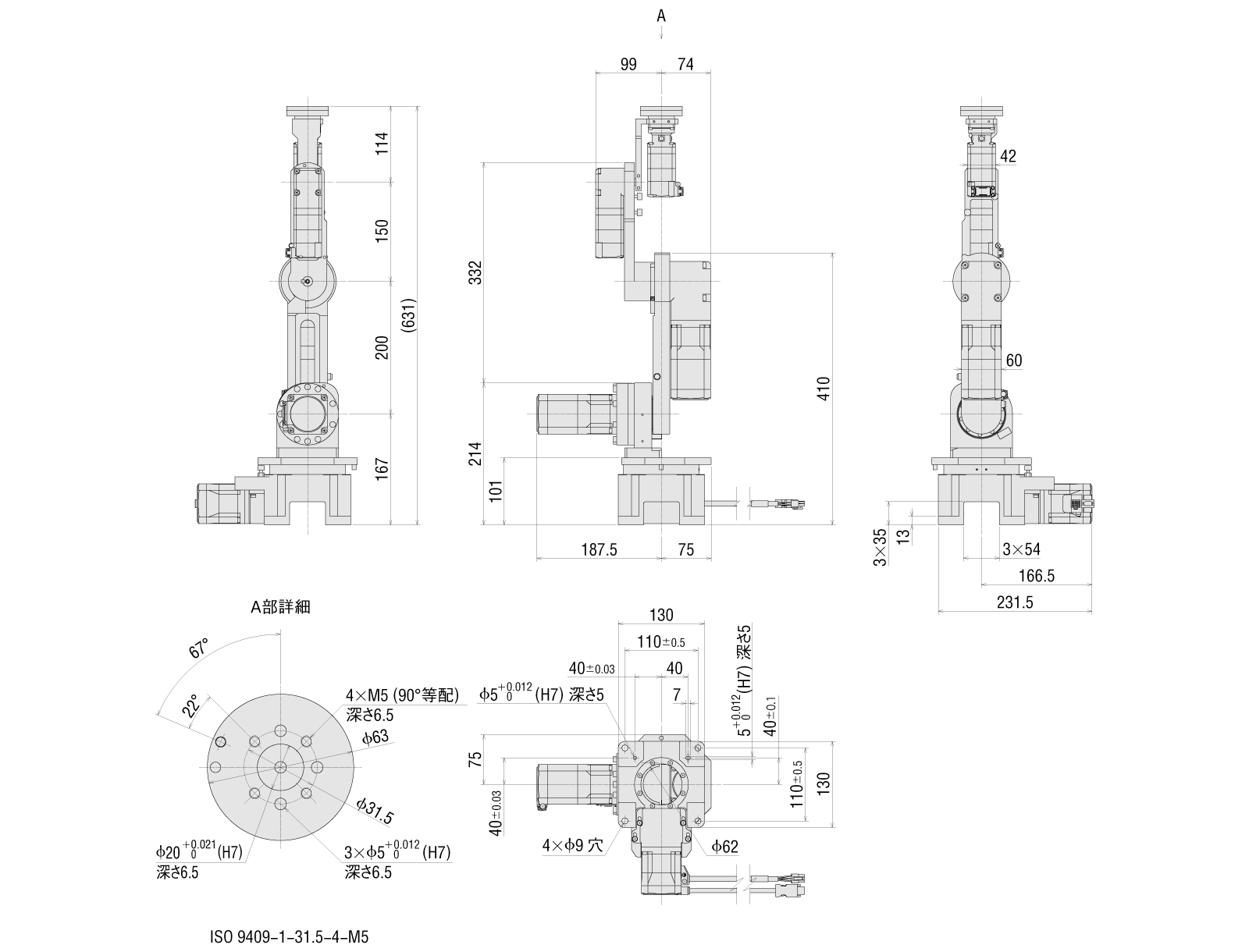
外形・動作範囲
■外形図[mm]
■動作範囲図[mm]
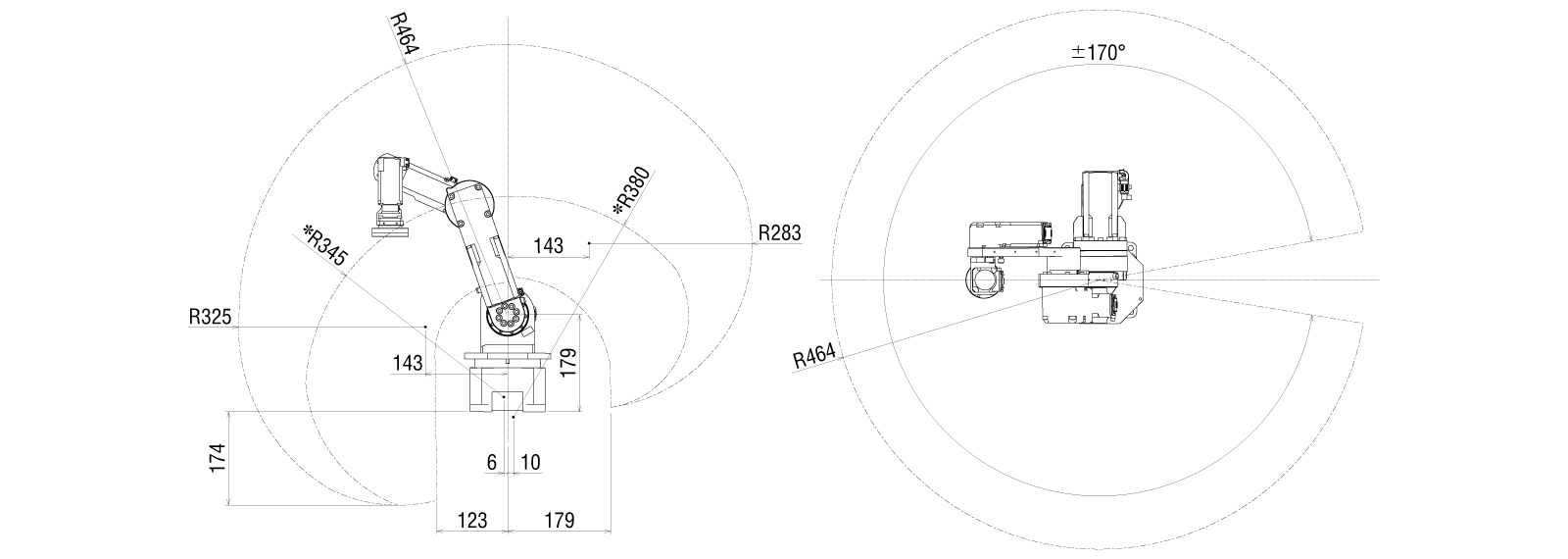
*の数字は手首軸を下向きにした場合のリーチ長を現わしています。
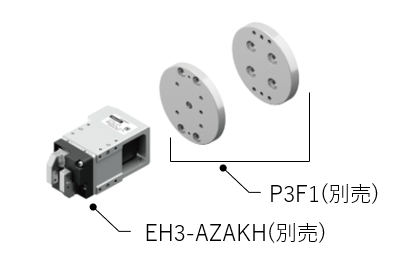
■モータハンドの構成例
電動ハンド(品名:EH3-AZAKH)の取付例です。ISO9409準拠のフランジ(品名:P3F1)と合わせると簡単に装着することができます。
 価格と納期 取付金具:P3F1 モータハンド:EH3-AZAKH
価格と納期 取付金具:P3F1 モータハンド:EH3-AZAKH
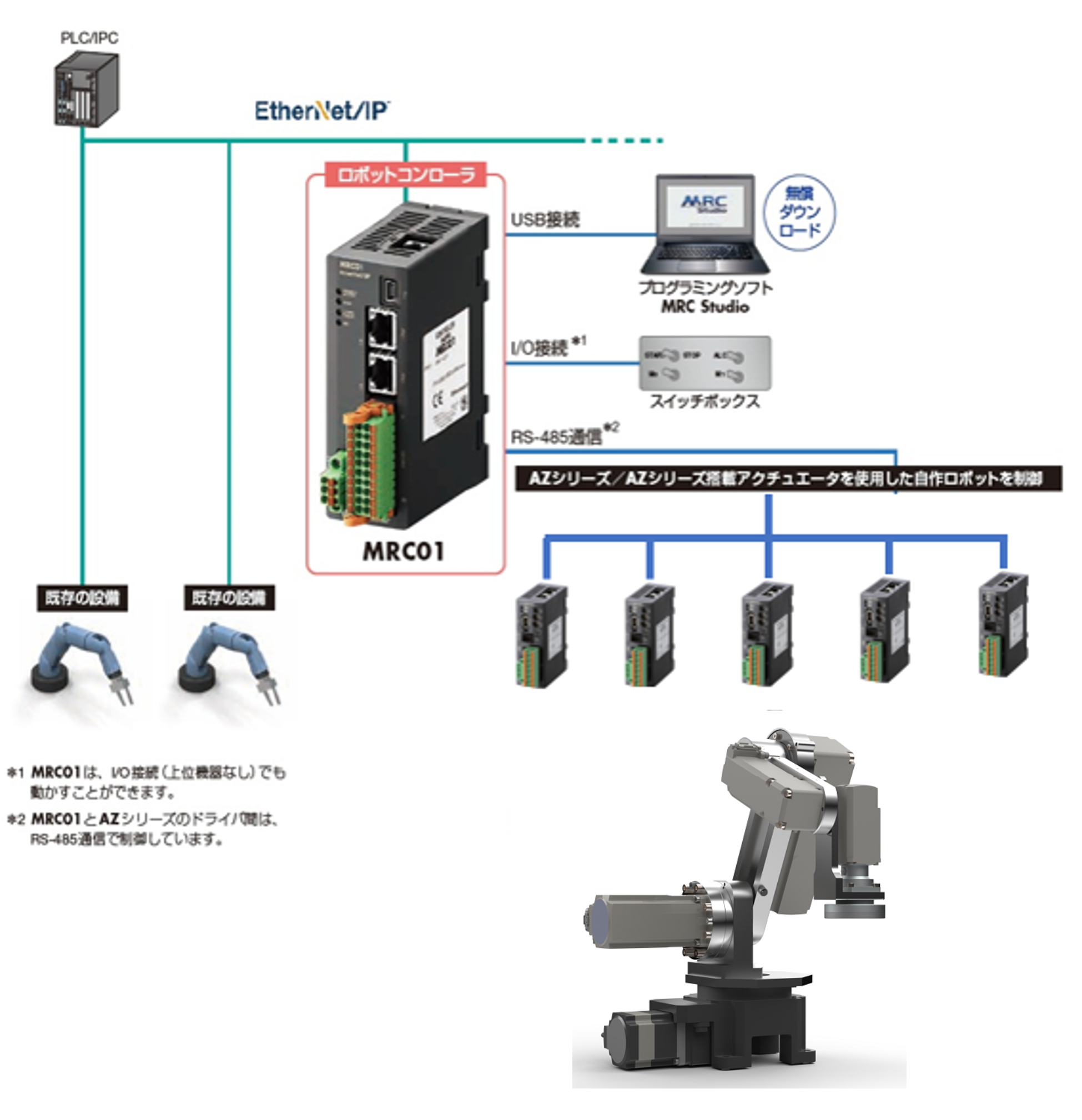
システム構成
ロボットアーム、モータ以外は別手配です。推奨ドライバは DC 電源入力タイプの小型ドライバ AZD-KDです。RS-485通信で、運転データ やパラメータの設定、 運転指令の入力をおこなえます。
またDC24V電源の推奨容量は600Wです。
詳しいシステム構成はカタログをご確認ください。
 5キロ可搬のロボットはこちら⋙
5キロ可搬のロボットはこちら⋙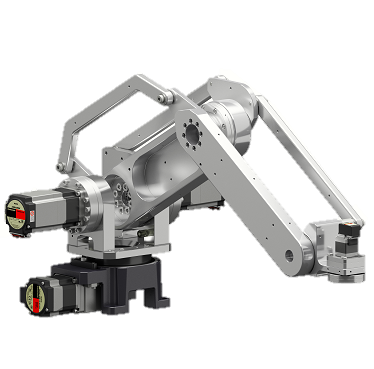
プロトコルはModbus(RTU)に対応しており、タッチパネルやコンピュータなどに接続できます。S軸(旋回)の中空ロータリアクチュエータの下から設置ドライバまでの距離に合わせて中継ケーブルを別途ご購入ください。
かんたんに制御できるコントローラMRC01

-
AZシリーズを搭載しているロボットを制御できるロボットコントローラMRC01です。
プログラミングソフトMRC Studioは(無料)はロボット制御未経験者でもすぐにマスターできるほど簡単なソフトです。
(ダウンロードはコチラ>>)
詳しくは「オリエンタルモーター製ロボットコントローラMRC01をレビューしてみた!」を参照ください。

-
MRC01とドライバを一体化したコントロールユニットもラインアップ。
ロボット導入における制御のハードルを下げ、立ち上げ時間の短縮に貢献します。
ロボットコントローラユニットMRCUシリーズの詳細はコチラ>>
- 注:使用時には産業用ロボットとしての安全を配慮してください。(協働ロボットとしては使用できません)
ロボットカバー
水や油などの環境対策に。ロボットの活用範囲を広げる「ロボットカバー」を用意しました。水や油の飛沫、溶接工程の火花(スパッタ)、クリーンルームに影響を与えない低発塵など用途に応じてお選びいただけます。



参考ページ:水や油などの環境対策に。ロボットの活用範囲を広げる「ロボットカバー」
ロボット導入前のお役立ちツール
MRC Studio Simulator

-
ロボット導入を検討している段階で、ロボット本体やMRC01がなくても、
PC上で実際の動きを想定したシミュレーションが可能なソフトウェア(無料)です。
詳しくはこちら>>



