小型ロボット OVR 4軸垂直多関節

-
4軸垂直多関節
OVR4048K5-V/OVR4068K5-V/OVR4088K5-V平行リンク機構のロボットアームです。
部品を常時水平にした状態で安定搬送できます。
水平最大リーチ長480mm、680mm、880mmの3タイプをラインアップ。
モーター、アーム交換が容易な構造となっており、ロボットの保守・メンテがお客様自身で行えます。
取付フランジはISO9409に準拠。様々なエンドエフェクタが取り付きます。※アウトレットモデルを台数限定・特別価格にて販売致します。
詳細は、下記にてご確認ください。

\ロボットの総合カタログはコチラ/ \グリッパやカメラを含むシステムの価格など/


特徴
<製品紹介・デモ機動画>
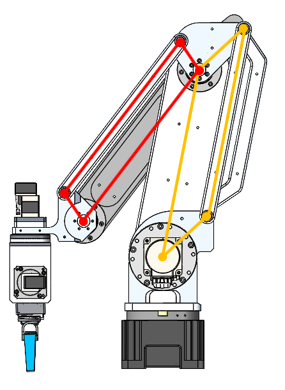
平行リンク機構による安定した水平搬送
-
平行リンク機構のロボットアームは、 原動リンクと従動リンクがあり、原動リンクが動くとその動きと同じ動きを従動リンクが行います。
動くときの形が必ず平行四辺形になるという特徴があり、対向するリンクの角度が維持されるのが特徴です。
例えば、自動車のワイパー、マジックハンド、パンタグラフなどがわかりやすいかと思います。
この機構を用いたロボットアームの先端は、設置面と機構的に常に水平を保つことができますので安定した水平搬送ができます。
2つのアームを駆動するモータを下に配置することで、関節部分の重量を軽量化させ、可搬重量を上げているのも特徴です。
セルフメンテナンス対応

-
一部のモーターをお客様にて交換できます。導入後のメンテナンス負担(コスト・時間)を軽減します。
※当社でも保守・メンテナンス時のモーター交換をおこなっています。 こちらまでお問い合わせください。
セルフカスタム対応
-
購入時に、お客様の用途に合わせてアームの長さをカスタマイズすることが可能です。
(リーチ長変更 580mm、780mm)
かんたんに制御できるコントローラMRC01

-
AZシリーズを搭載しているロボットを制御できるロボットコントローラMRC01です。
プログラミングソフトMRC Studioは(無料)はロボット制御未経験者でもすぐにマスターできるほど簡単なソフトです。
(ダウンロードはコチラ>>)
詳しくは「オリエンタルモーター製ロボットコントローラMRC01をレビューしてみた!」を参照ください。

-
MRC01とドライバを一体化したコントロールユニットもラインアップ。
ロボット導入における制御のハードルを下げ、立ち上げ時間の短縮に貢献します。
ロボットコントローラユニットMRCUシリーズの詳細はコチラ>>
-
注:使用時には産業用ロボットとしての安全を配慮してください。(協働ロボットとしては使用できません)
仕様
-
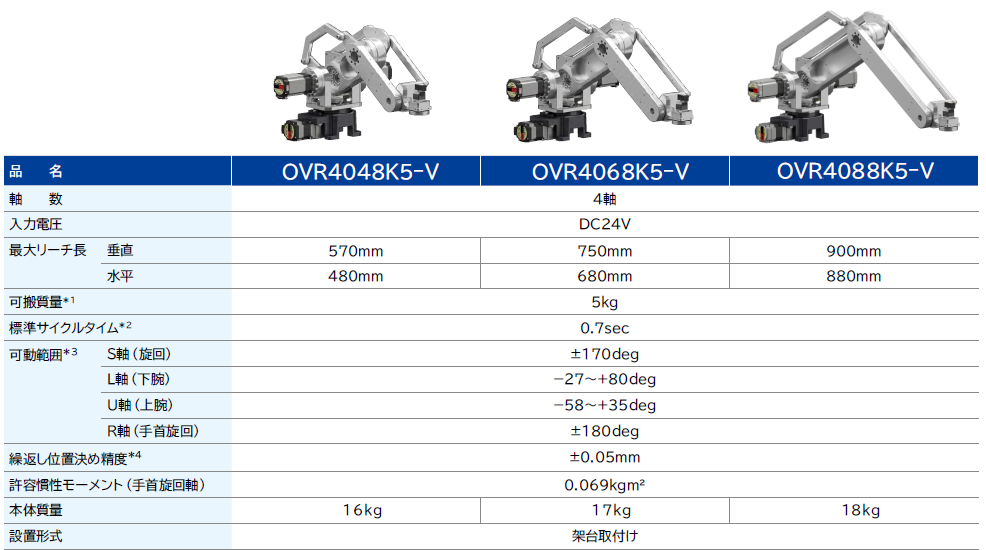
*1 可搬質量5kgは当社評価ワークを搭載した値です。
最大可搬質量 1kg のロボットアームもご用意しています。定価98万円から。詳しい情報はコチラから⋙
*2 負荷1kg時、高さ25mm、幅300mmの2点間を往復させるのに要する時間です。オリエンタルモーター製ロボットコントローラMRC01を使用した時のサイクルタイムです。
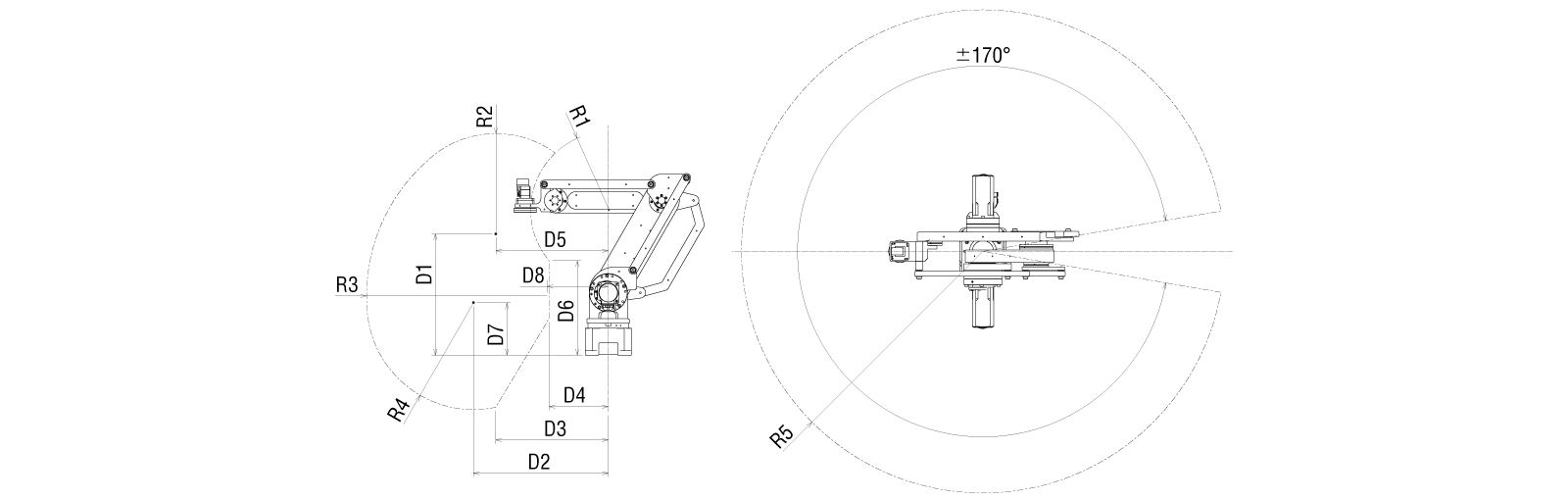
*3 可動範囲は設置原点位置(0deg)を基準に±移動可能な範囲です。
*4 各軸減速機の仕様値に基づきます。
* 推奨電源容量DC24V 500W -
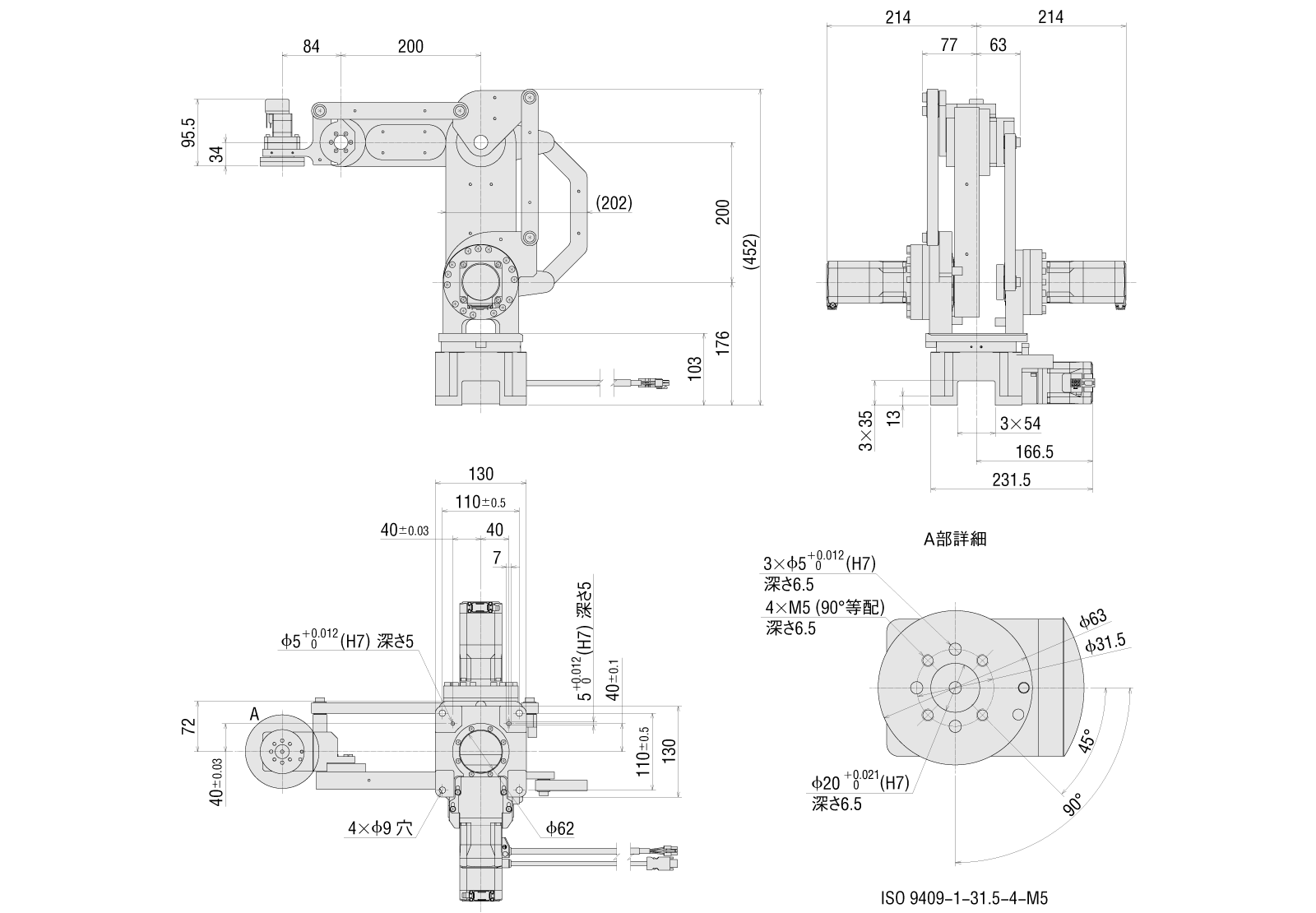
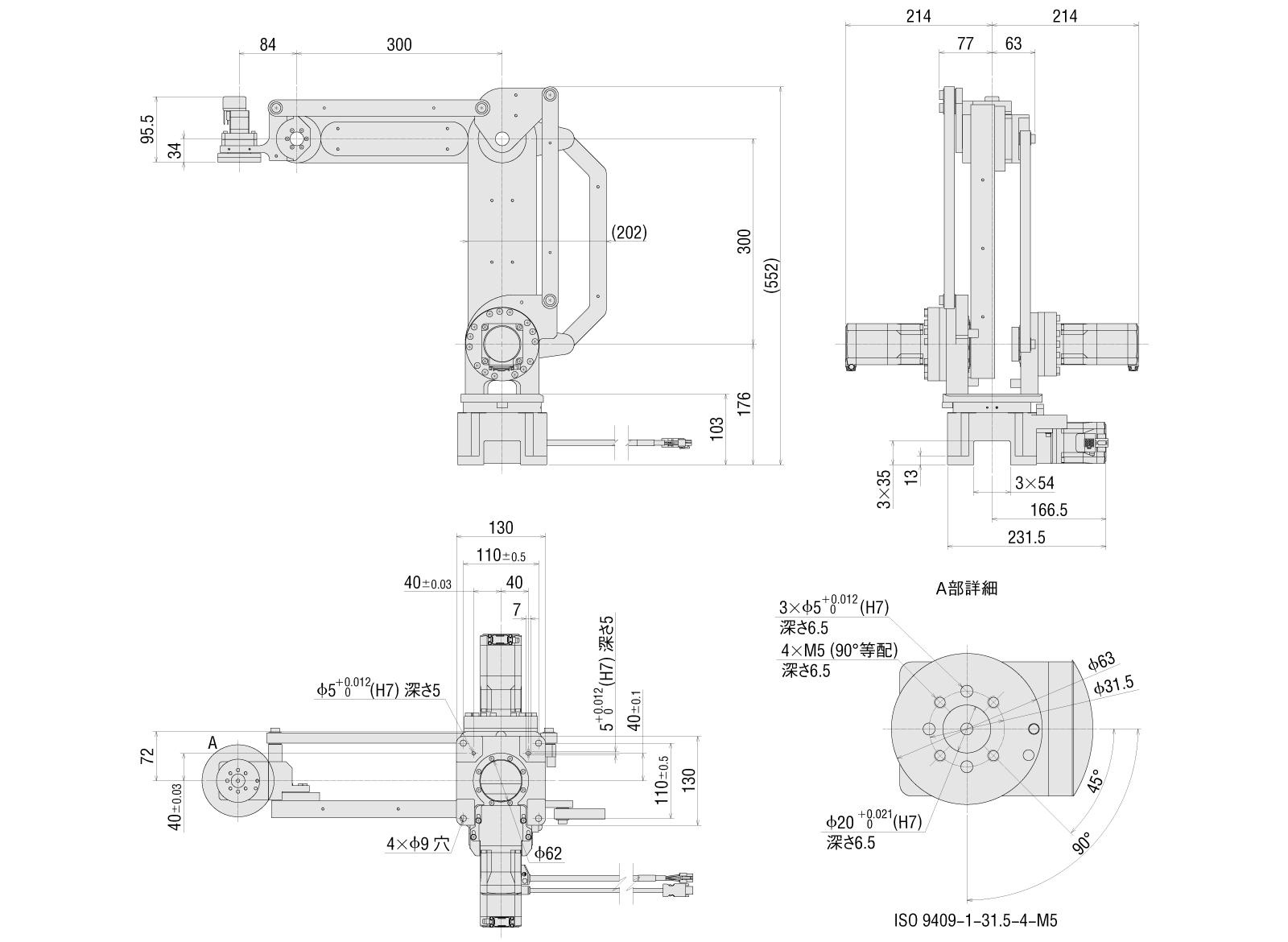
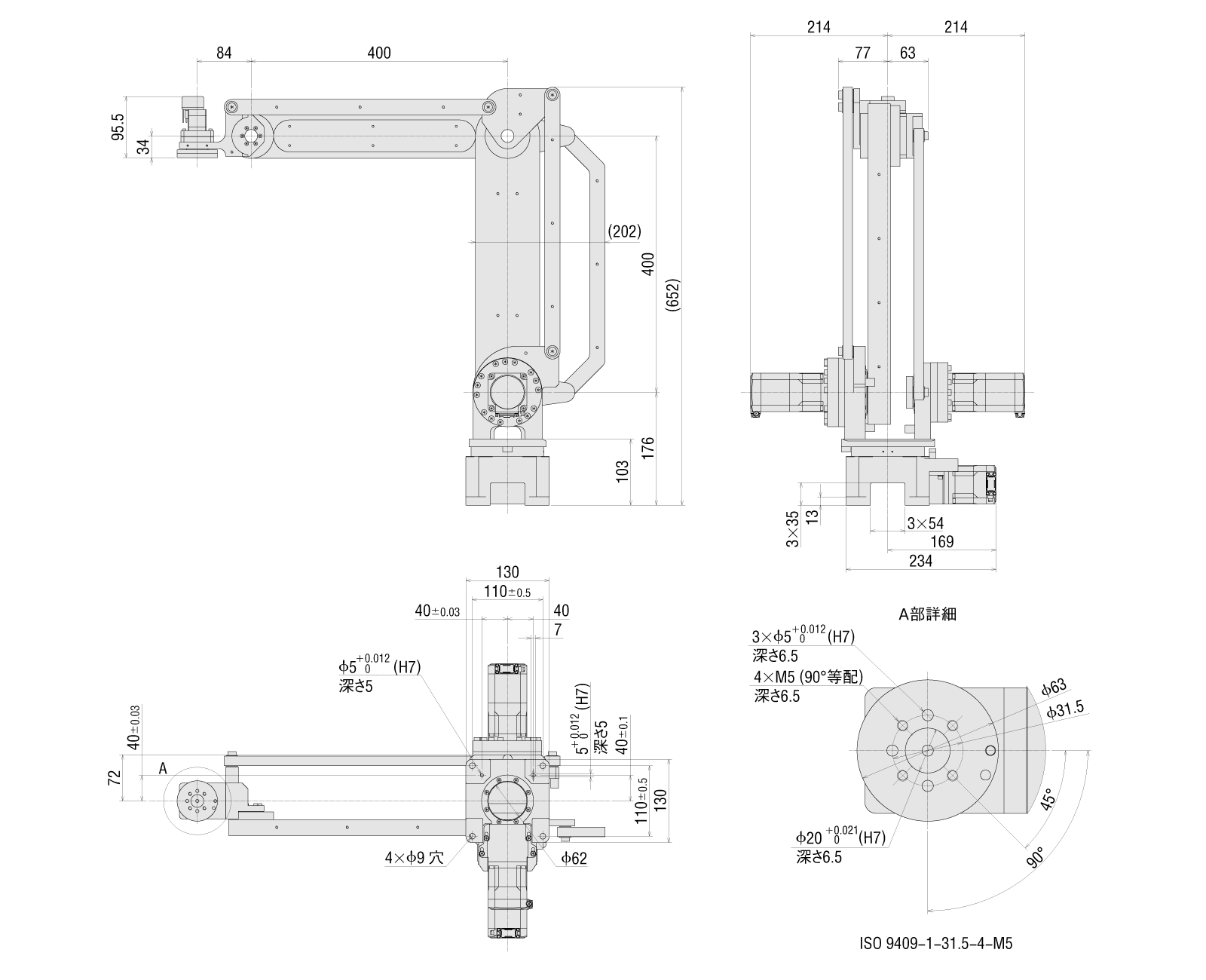
外形・動作範囲図
外形図
OVR4048K5-V
OVR4068K5-V
OVR4088K5-V
動作範囲図

各種データ
取扱説明書 
3DCAD OVR4048K5-V(3D)
OVR4068K5-V(3D)
OVR4088K5-V(3D)2DCAD OVR4048K5-V(2D)
OVR4068K5-V(2D)
OVR4088K5-V(2D)※CADデータは右クリックで ”名前を付けてリンク先を保存”でDLできます。
システム構成
ロボットアーム、モータ以外のロボットコントローラ、ドライバ、ケーブルは別手配です。
ロボットコントローラMRC01とプログラミングソフトMRC Studioを使用することで簡単にロボット制御が可能です。
MRC01に接続できる推奨ドライバは DC 電源入力タイプの小型ドライバ AZD-KD、またはminiドライバAZD-KR2Dです。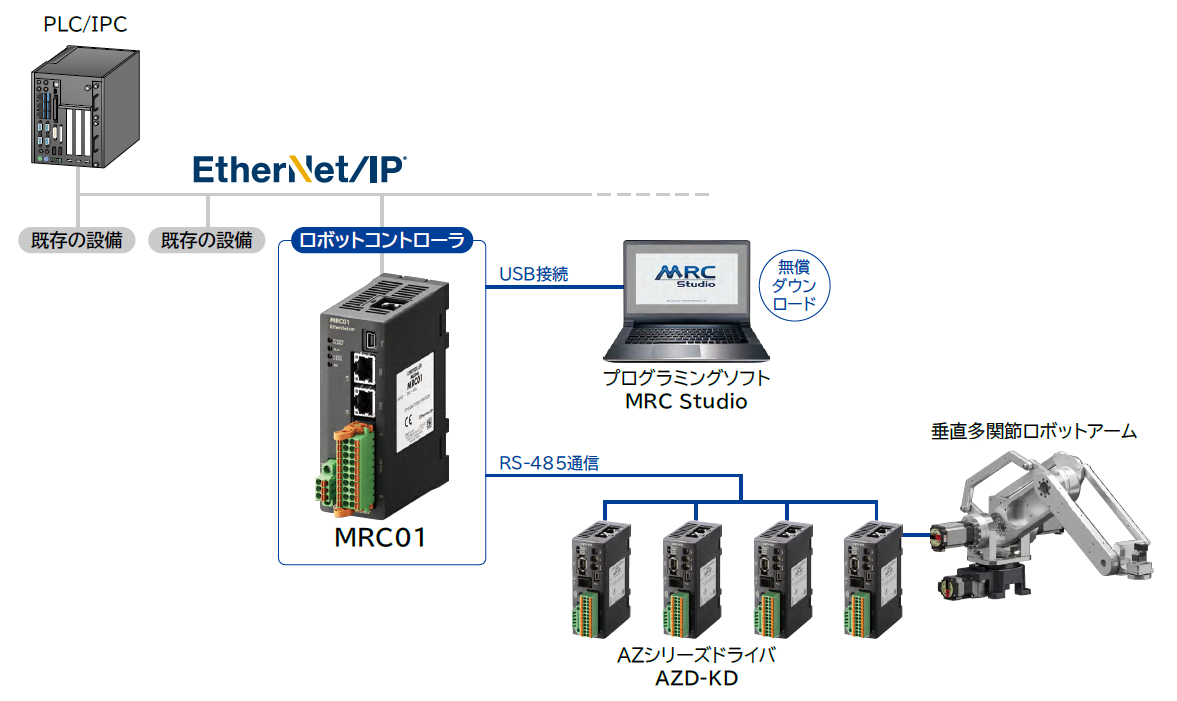
※MRC01とAZD-KR2DがワンパッケージとなったロボットコントローラユニットMRCUシリーズもラインアップ。
早期立ち上げとすっきりとした配線設計が可能です。
ロボットコントローラユニットMRCUシリーズの詳細はコチラ>>

ロボットカバー
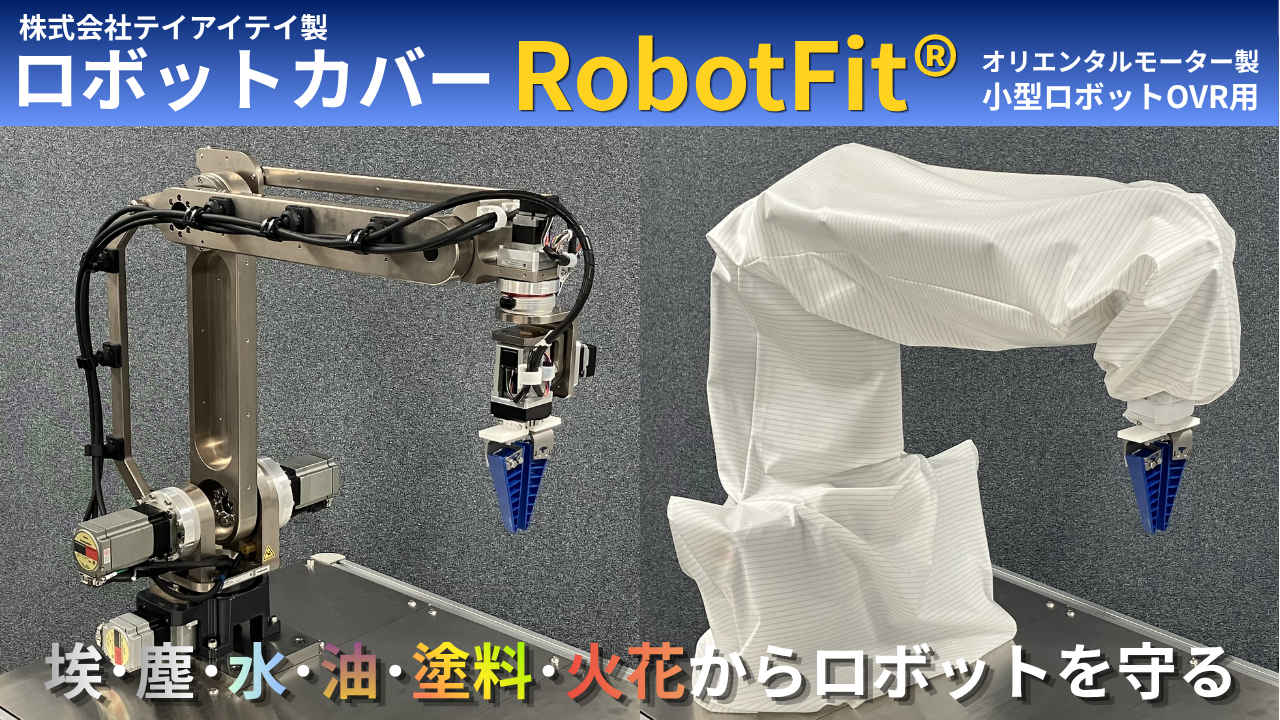
-
水や油などの環境対策に。ロボットの活用範囲を広げる「ロボットカバー」を用意しました。水や油の飛沫、溶接工程の火花(スパッタ)、クリーンルームに影響を与えない低発塵など用途に応じてお選びいただけます。
手首曲げ軸取付金具
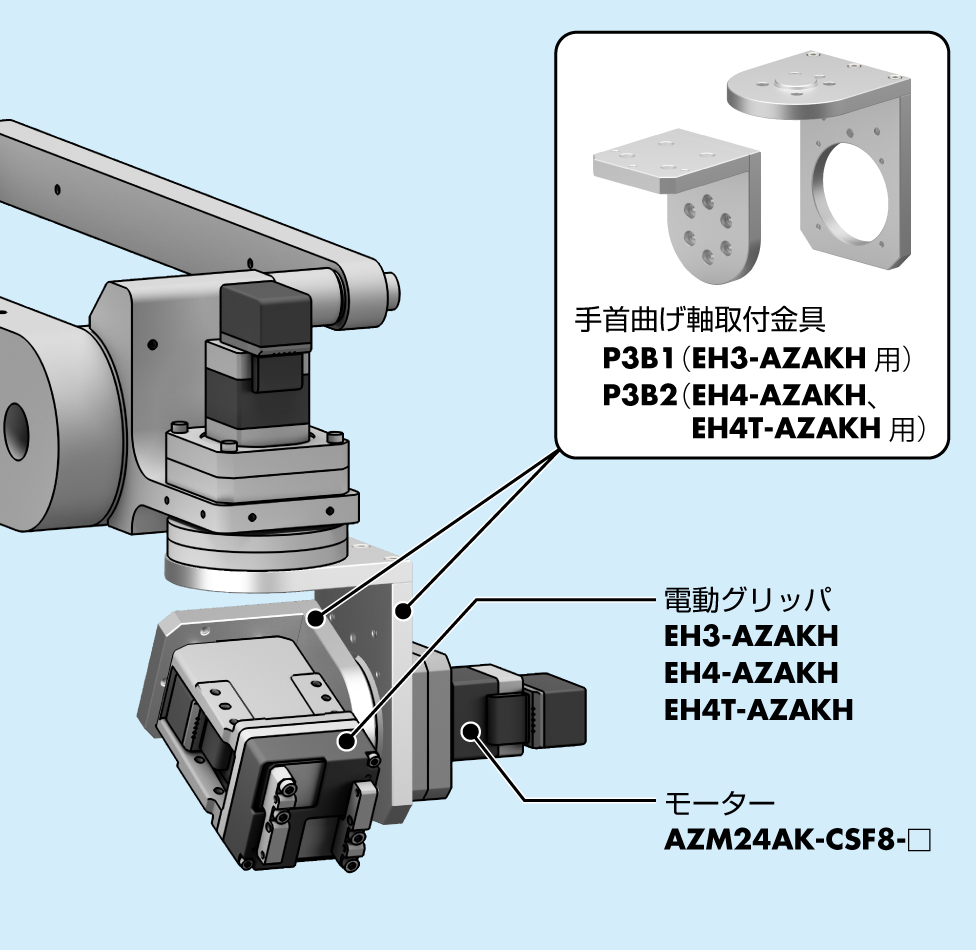
※ 総重量:1.06 kg
(電動グリッパEHシリーズ、AZシリーズCSFギヤードタイプを含む)-
リンク機構によりアーム先端は常に下を向いているため、
ピックアンドプレイスをさせるには4軸だけの制御で使用できます。
ただし、手首上げ下げの要素がないと使いにくいという事例も多くあります。
「手首曲げ軸取付金具」はその課題を解決するツールです。
用途例
・電動グリッパを90度持ち上げて棚からワークを掴み、梱包箱に入れる。
・ワークを取り上げて背面の画像を撮影してから箱詰めする。
・バイト、トーチを少し傾けて作業する。
詳しくはこちら>>
関連製品
ハーモニック・ドライブ・システムズ CSF miniシリーズ 超偏平・高剛性タイプ
オリエンタルモーター αSTEP AZシリーズ
オリエンタルモーター 電動グリッパ EHシリーズお役立ち情報
各種エンドエフェクタ ラインアップのご紹介>>>
徹底比較 第2弾! エンドエフェクタ 5メーカー 11シリーズを比べてみた!!ロボット導入前のお役立ちツール
MRC Studio Simulator

-
ロボット導入を検討している段階で、ロボット本体やMRC01がなくても、
PC上で実際の動きを想定したシミュレーションが可能なソフトウェア(無料)です。
詳しくはこちら>>
MRC Reality

-
実空間にバーチャルロボットを設置して、操作シミュレーションが可能です。
スマートフォン/タブレット用、ヘッドマウントディスプレイ(Meta Quest 3)用のアプリをご用意しています。
詳しくはこちら>>

iPad Meta Quest 3 ロボットで実現したいことはお決まりですか? 気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
