No.04 採用事例:グリス塗布装置 オリエンタルモーター株式会社
- 垂直多関節ロボットアーム・プログラムサポート採用事例
小型ロボットアームで人の作業を自動化 - ■装置 グリス塗布装置
■用途 ボールねじへのグリス塗布
■採用製品 ロボットコントローラ MRC01
小型ロボットOVR 4軸垂直多関節
中空ロータリーアクチュエータ DGⅡシリーズ
電動スライダ EZSシリーズ
\ロボットの総合カタログはコチラ/ \事例の詳細・システムの価格など/

課題
- コンパクト電動シリンダの組み立て工程は、ボールねじにグリスを塗布する工程から始まる。
しかし、手作業で行っているため、塗布量、塗布する位置など人の技量が必要な作業だった。
そのため、特定の人員しか作業できず生産性向上におけるボトルネックとなっていた。

コンパクト電動シリンダ
手作業でグリスを塗布
-
解決策
- ロボットコントローラMRC01、小型ロボットOVR 4軸垂直多関節を使用したグリス塗布装置を製作、導入。
中空ロータリーアクチュエータDGⅡシリーズ+チャック機構で、ボールねじを把持。
径違いのボールねじも段取り不要で把持。
手作業で行なっていたグリス塗布量を一定化することで機械化を実現。ばらつきも安定。
ボールねじにグリスを馴染ませる作業は、中空ロータリーアクチュエータDGⅡシリーズ、電動スライダ EZSシリーズで機械化。 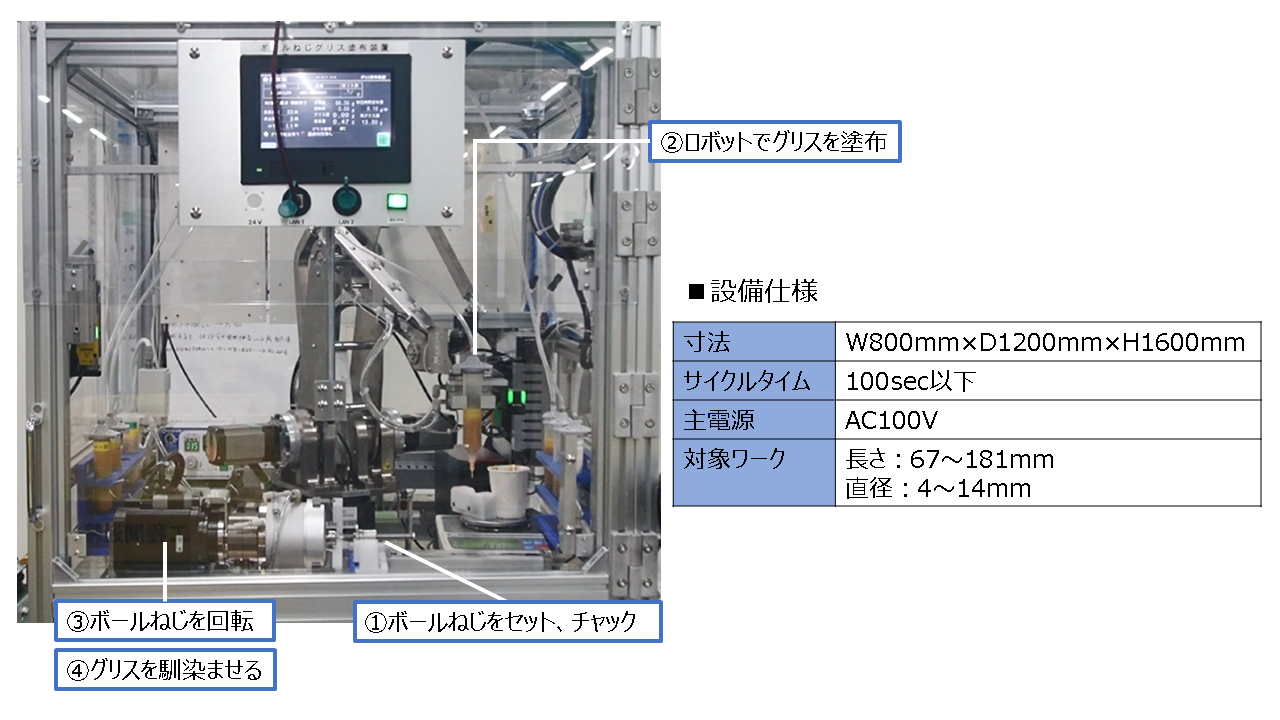
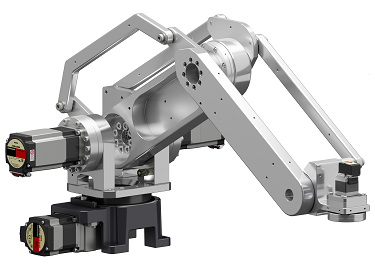
- 小型ロボットOVR 4軸垂直多関節 OVR4068K5-V
・軸数:4軸
・可搬質量:5kg
・最大リーチ(水平):729mm(垂直)、680mm(水平)
・繰り返し位置決め精度:±0.05mm
・DC24V駆動
※実際に採用している製品は旧型式のOVR680K5です。
最新製品は写真のOVR4068K5-Vになります。
詳しくはコチラをご覧ください⋙ 
- ロボットコントローラMRC01
「初期設定」「動作プログラミング」「動作確認」の3ステップで、自作ロボットを簡単に導入・制御できるロボットコントローラ。
専用プログラミングソフトMRC Studioは無料でダウンロード可能。
ラダープログラムなどの専門知識がなくても、直感的にプログラムを入力。
制御方法:EtherNet/IP通信、I/O
対応製品:ロボットアームOVRシリーズ、AZシリーズを搭載した自作ロボット
詳しくはコチラをご覧ください⋙ 
- 中空ロータリーアクチュエータ DGⅡシリーズ
大慣性負荷を直接取り付けられる、中空ロータリーテーブルとモーターの一体型製品。
機構設計・部品手配・組付け調整などの手間やコストを削減。
バッテリレスのアブソリュートセンサを内蔵しているAZシリーズを搭載。
詳しくはコチラをご覧ください⋙
\採用ロボットのカタログはコチラ/ \事例の詳細・システムの価格など/
採用ポイント
製品によって使用するグリスが異なるため、設備には複数のディスペンサを設置するスペースが必要だった。
そのため、スライダ/シリンダといった直交軸ではなく、垂直多関節ロボットで検討した。
小型ロボットOVR 4軸垂直多関節は、設置面積が130mm×130mmと省スペース設置で広範囲作業が可能なこと、また安価であることが採用のポイントとなった。
これにより複数のディスペンサを狭い設備内に設置できたため、ディスペンサのオートチェンジ(段取り)を実現できた。多品種生産を可能にしている。
制御面では、通常、PLCで多軸のモーターを制御する場合、ラダープログラムを組むのが大変で、高いスキルが求められる。
そこで、プログラム作成が簡単にできるロボットコントローラMRC01を合わせて採用することにした。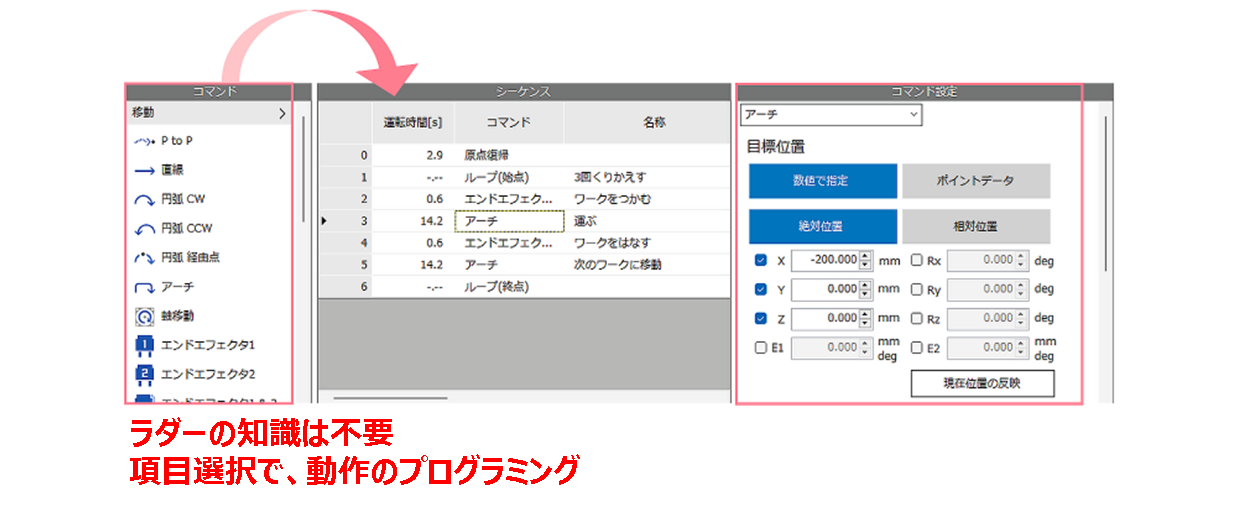
また、周辺の回転駆動、直線駆動には、バッテリレスアブソリュートセンサ内蔵のAZシリーズを搭載したアクチュエータをそれぞれ採用した。
モーター部分が同じAZシリーズのため、配線・制御を統一できる。立上げの負荷軽減と時間短縮につながった。

導入効果
| 導入前 | 導入後 |
| 特定の人員でしか作業できない | 人の技量が不要 生産量の変動にも柔軟に対応 |
| 塗布量が一定ではないため 塗り足しやふき取りが発生 |
塗布量を一定化したため 品質安定 |
|
生産量:100台/日 |
生産量:108台/日 |
採用製品(一部)

- 電動スライダ EZSシリーズ
ボールねじの回転とガイドにより、正確で精密な直線駆動が可能。
バッテリレスのアブソリュートセンサを内蔵しているAZシリーズを搭載。
クリーンルーム対応品(ISO規格 クリーン度クラス3)をご用意。
詳しくはコチラをご覧ください⋙
関連サービス
自動化支援サービス
自動化装置を導入したいけど、ちょうどいい装置がない、自社ではなかなか手を付けられない…というお悩みをサポート。
「手作業の繰り返しを自動化」をコンセプトに、お客様のラインに適したリーズナブルな装置をご提案いたします。
詳しくはこちら>>
セットアップサポート
ロボットや小規模装置の立ち上げ・導入を自社で考えているお客様に対してはじめの一歩をサポートします。
導入時のプログラムサポート等、「最初のきっかけさえわかれば先に進める」を後押し。業務の負担軽減・時短に貢献します。
詳しくはこちら>>
製品選定段階から装置設計をサポートいたします! お気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
