ロボットコントローラ
「初期設定」「動作プログラミング」「動作確認」の3ステップでかんたんに導入・制御できるロボットコントローラです。αSTEP(アルファステップ)AZシリーズを使用したロボットを制御できます。専用のプログラミングソフト MRC Studioは無償でダウンロードができます。
この製品の取り扱いメーカー
![]()

製品紹介
- MRC01
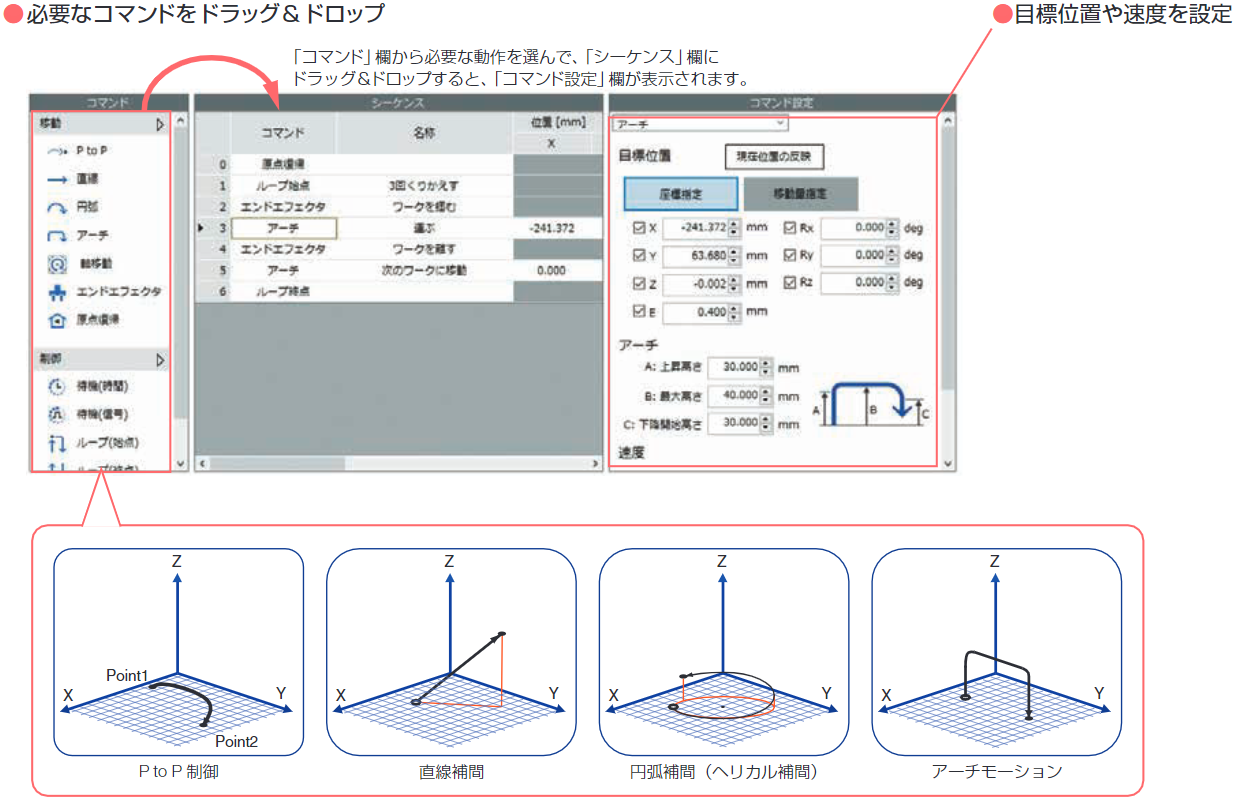
ラダーの知識は不要。項目選択で、動作のプログラミング。 プログラムの作成は、コマンドを選択していくかんたんな方式です。ラダーなどの専門知識がなくても直感的 にプログラムを作成できます。P to P運転、直線補間運転、円弧補間運転、アーチモーションなどに対応しています。 さらに、上位制御機器からEtherNet/IP経由で、直接運転データを実行することもできます。カメラでワークの停止座標を読み取り、ロボットがワークを取りに動作します。
ロボットコントローラ
3ステップで、誰でもロボットマスター
「初期設定」「動作プログラミング」「動作確認」の3 ステップで、自作ロボットをかんたんに導入・制御できるロボットコントローラ。
αSTEP(アルファステップ)AZシリーズ/AZシリーズ搭載アクチュエータを使用した自作ロボットを制御できます。
専用のプログラミングソフトMRC Studioは、無償でダウンロードいただけます。(プログラミングソフトMRC Studioはこちらよりダウンロードできます。)
Step1. ガイダンスに従って、迷わず初期設定
ロボットタイプの選択や機構情報の入力など、一連の初期設定をウィザード形式でおこなえます。 イラストを見ながらガイダンスの指示に従って設定することで、初めてでも短時間でロボットの初期設定ができます。
Step2. ラダーの知識は不要。項目選択で、動作のプログラミング
プログラムの作成は、コマンドを選択していくかんたんな方式です。ラダーなどの専門知識がなくても直感的にプログラムを作成できます。P to P運転、直線補間運転、円弧補間運転、アーチモーションなどにランダムに組み合わせて対応できます。 さらに、上位制御機器からEtherNet/IP経由で、直接運転データを実行することもできます。
Step3. オンライン 3D シミュレーションで、動作確認
ロボットの動作プログラムを3Dシミュレータ上で確認することができます。 実機を動かす前に、プログラムの簡易的なチェックができます。
Stepごとの設定方法を動画で説明しています。詳細はこちら⋙
垂直多関節ロボット対応 ・エンドエフェクタ制御可能 ・簡単設定、簡単操作 商品パンプレットはこちら≫![]()
定価220,000円
<既存のシステムに簡単にロボットを導入>
MRC01と上位システムとの連携は、EtherNet/IP™でダイレクト制御。既存の設備の制御システムを大きく変更せずに、自作ロボットをかんたんに追加導入できます。
※EtherNet/IP™はODVAの商標です。

ラダーの知識は不要。項目選択で、動作のプログラミング
プログラムの作成は、ガイダンスに従ってロボットタイプを選び、コマンドを選択していくかんたんな方式です。ラダーなどの専門知識がなくても直感的 にプログラムを作成できます。P to P運転、直線補間運転、円弧補間運転、アーチモーションなどに対応しています。 さらに、上位制御機器からEtherNet/IP経由で、直接運転データを実行することもできます。カメラでワークの停止座標を読み取り、ロボットがワークを取りに動作します。
また、4軸多関節ロボットアーム(OVR680K5)もセットアップデフォルトで登録されていますので、ティーチング動作でポイントをセットして速度を入力するだけの、数時間でロボットアームを稼働させることができます。
これを見れば早わかり⇨No.17 オリエンタルモーター製ロボットコントローラ MRC01をレビューしてみた!


- 製品情報
